Silniki DC – klasyka w dziedzinie mechatroniki (i nie tylko)
Silniki prądu stałego nadal są najmniej skomplikowanymi napędami pod względem zasilania oraz sterowania. W najprostszym przypadku wystarczy jedynie podłączyć napęd do baterii, akumulatora lub zasilacza, tak też zresztą działa znakomita większość prostych urządzeń (zabawki elektryczne, wiatraczki itp.). Co więcej, napędy te – odpowiednio „obudowane” za pomocą przekładni i enkoderów – są w stanie wykonywać nawet trudne zadania, związane z precyzyjnym pozycjonowaniem mechanizmów czy też poruszaniem dużych obciążeń mechanicznych. Choć w wielu zastosowaniach można wykorzystać silniki DC bez przekładni (np. we wspomnianych już wcześniej wentylatorach i wiatraczkach), to swoje prawdziwe możliwości silniki prądu stałego ukazują po wyposażeniu ich w przekładnie redukcyjne. Za cenę obniżenia prędkości obrotowej (która zwykle jest bardzo wysoka, nawet w niedrogich, małych silniczkach) otrzymujemy spory moment obrotowy, zdolny do napędu nawet cięższych konstrukcji – najczęściej kołowych i gąsienicowych robotów mobilnych. Szczególnie cenne propozycje ma w swojej ofercie firma Pololu – produkuje ona szereg silników z serii micro, wyposażonych w solidne, wielostopniowe przekładnie zębate. Co bardzo ważne, są one wykonane w całości z metalu, dzięki czemu te miniaturowe napędy radzą sobie bez problemu z generowaniem momentu obrotowego od 0,1 kg*cm (np. silnik HP 5:1 – Pololu 1000) do aż 9 kg*cm (silnik HP 1000:1 – Pololu 1595). Niektóre modele, jak 6-woltowy HPCB 5:1 o numerze 3082, mają dwustronny wał, który umożliwia montaż enkodera inkrementalnego albo prostego przerywacza optycznego, umożliwiającego zgrubny pomiar prędkości obrotowej.
Silniki DC z serii 25D i 37D – solidne napędy o niewielkich wymiarach
Średniej wielkości roboty mobilne mogą być budowane w oparciu o napędy z serii 25D oraz 37D, także produkowane przez firmę Pololu. Oznaczenie numeryczne symbolizuje średnicę silnika, wyrażoną w milimetrach. Seria 25D zawiera przeszło dwadzieścia modeli o zróżnicowanych parametrach – większość jest przeznaczona do zasilania napięciem 6 V, ale niektóre odmiany mogą pracować z napięciem dwukrotnie wyższym. Dostępne momenty obrotowe i prędkości wyjściowe zależą rzecz jasna od stopnia przełożenia przekładni i wynoszą od 0,6 kg*cm (przy prędkości 1300 rpm i przełożeniu 4,4:1), aż do 23 kg*cm (tutaj prędkość obrotowa wynosi 33 rpm, a przełożenie 227:1). Silniki DC Pololu z serii 25D mają znormalizowany rozstaw gwintowanych otworów mocujących, co znakomicie ułatwia zarówno projektowanie mechanizmu, jak i ewentualną podmianę napędu na inny model. W serii 37Dx53L (drugi wymiar to długość napędu) znajdziesz modele o przełożeniu od 10:1 do 100:1, co odpowiada zakresowi momentów obrotowych od 4,89 kg*cm do aż 34 kg*cm.
Inne serie silników DC
Przegląd najważniejszych rodzajów silników do robotów
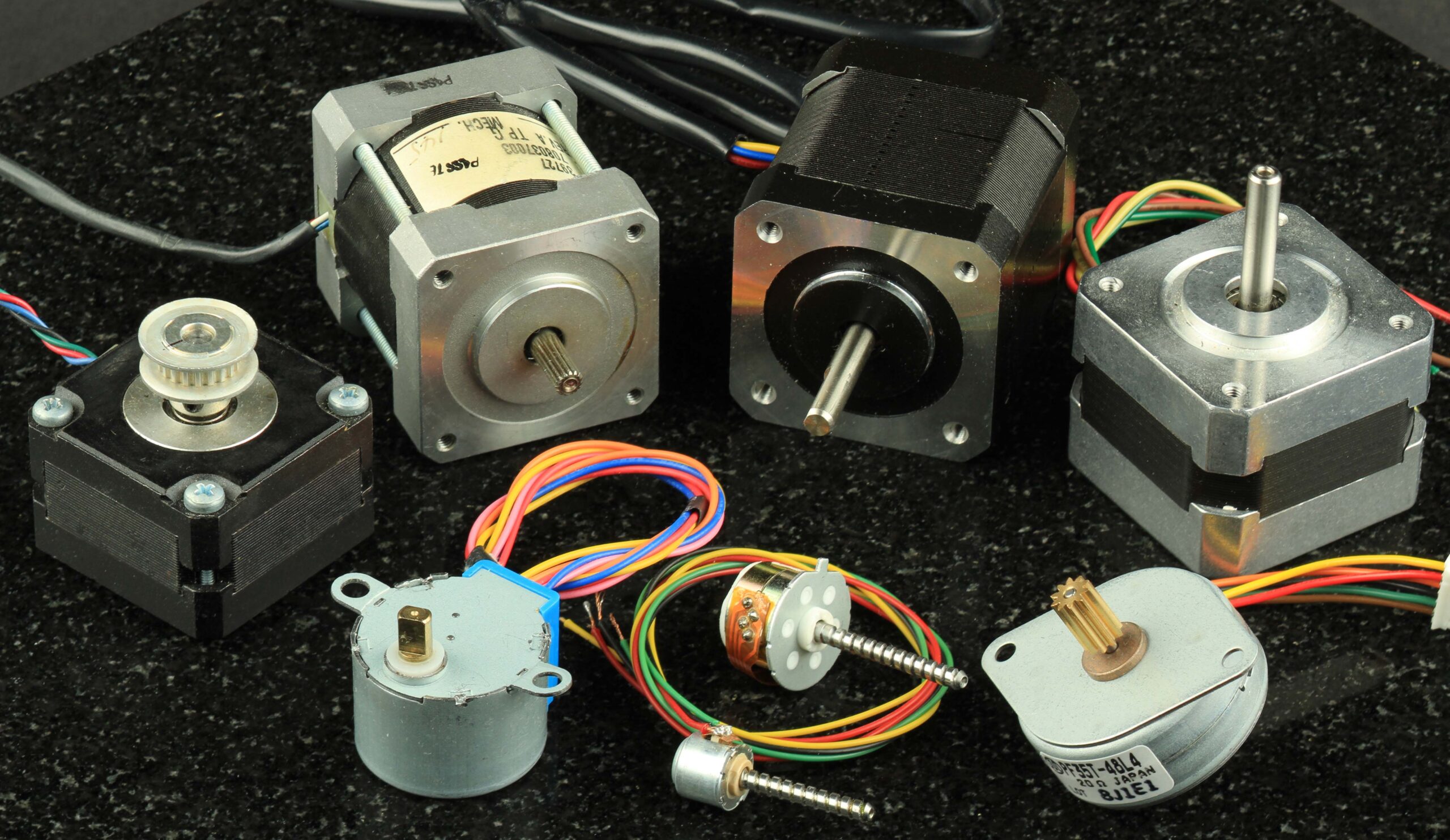
Najbardziej klasycznym rodzajem napędu, stosowanym wszędzie tam, gdzie wymagane są ciągłe obroty z zadaną prędkością i przy określonym momencie obrotowym, są silniki DC. Do ich niewątpliwych zalet należy ogromna łatwość sterowania – wystarczy jeden tranzystor (w przypadku mechanizmów obracających się tylko w jednym kierunku) lub mostek H (umożliwiający zmianę kierunku obrotów), zaś prędkość można łatwo kontrolować za pomocą współczynnika wypełnienia sygnału PWM. Silniki krokowe doskonale sprawdzają się w precyzyjnym pozycjonowaniu, stąd ich ogromna popularność we wszystkich rodzajach drukarek 3D, skanerach, drukarkach biurowych itp. Niektóre modele są także wyposażone w przekładnie, pozwalające na zwiększenie momentu obrotowego. Szczególną odmianą silników krokowych są silniki bezszczotkowe prądu stałego (BLDC), osiągające niebywałe wprost prędkości obrotowe i świetnie nadające się do napędu małych bezzałogowców. Nie można także zapominać o specyficznych odmianach napędów – często zamiast ruchu obrotowego potrzebujemy ruchu posuwisto-zwrotnego. Wtedy sięgamy po wszelkiej maści siłowniki liniowe. W niektórych zastosowaniach wykorzystujemy też miniaturowe silniki wibracyjne – mają one zastosowanie przede wszystkim w urządzeniach mobilnych, kontrolerach gier czy też interfejsach człowiek-maszyna (HMI). Uznanie robotyków i modelarzy zdobyły swego czasu napędy tunelowe EDF, pozwalające na budowę niewielkich poduszkowców oraz zwiększanie przyczepności robotów wyścigowych (m.in. line follower) do podłoża. Niewielkie układy hydrauliczne i pneumatyczne wykorzystują z kolei różnego rodzaju pompy – w robotyce do ich zastosowań należy m.in. budowa systemów chwytaków podciśnieniowych.