Warto pamiętać, że tylko właściwie wyselekcjonowane silniki do robotów – czy to mobilnych, czy też manipulacyjnych – potrafią sprostać stawianym im wymaganiom. Prosty ruch chwytaka może zrealizować zarówno silnik DC z przekładnią planetarną, jak i silnik krokowy, serwomechanizm, a nawet… silnik liniowy. Wszystko zależy od konkretnych parametrów – wymaganej szybkości ruchu, rozdzielczości i precyzji pozycjonowania, udźwigu, wymiarów, masy własnej, a także… możliwości samego sterownika. Niektóre z wymienionych rozwiązań nadają się do stosowania tylko w zamkniętej pętli sprzężenia zwrotnego (tj. z uwzględnieniem informacji, powracającej do sterownika z odpowiednich czujników), inne mogą w pewnych warunkach pracować bez jakiegokolwiek sprzężenia. Znajomość różnic pomiędzy poszczególnymi grupami, a nawet modelami silników, nie tylko ułatwia odpowiednie zaplanowanie całej konstrukcji, ale wręcz stanowi warunek konieczny dla poprawnego wykonania takiego planu. Dlatego właśnie na naszym blogu nie tylko przedstawiamy najważniejsze kwestie teoretyczne, ale także wskazujemy konkretne przykłady silników do robotów, które sprawdzą się zarówno w prostych robotach mobilnych, jak i całkiem złożonych konstrukcjach. Zwracamy uwagę na różnice pomiędzy pozornie zbliżonymi, napędami oraz sterownikami, prezentujemy też garść praktycznych porad, np. jak podłączyć silnik krokowy czy też jak sprawdzić silnik bezszczotkowy bez konieczności podłączania sterownika.
Silniki do robotów
Silniki do robotów
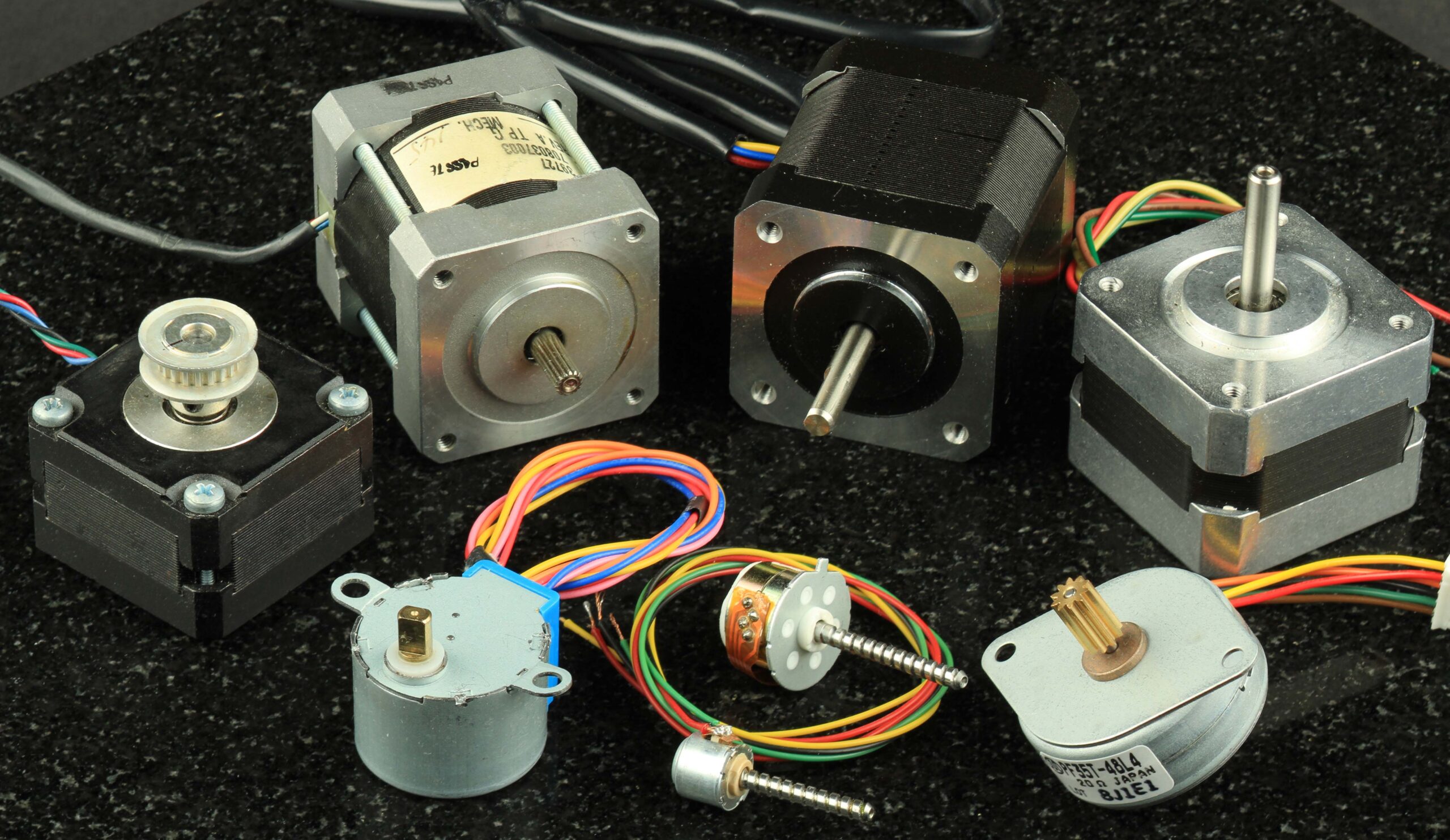
Trudno wyobrazić sobie jakiekolwiek robota (oczywiście z wyjątkiem tzw. „botów internetowych”), który nie wykorzystywałby określonego rodzaju napędów do przemieszczania się i/lub wykonywania manipulacji na obiektach z jego otoczenia. Choć w zastosowaniach przemysłowych często używane są napędy pneumatyczne (rzadziej także hydrauliczne), to od lat prym w tej dziedzinie wiodą wszelkiej maści silniki elektryczne. Nic dziwnego – ich wybór jest oczywistą konsekwencją elektronicznej natury sterowników i łatwości, z jaką można sprzęgnąć urządzenia wykonawcze z kontrolerami. Rynek napędów elektrycznych jest jednak bardzo zróżnicowany i dlatego nie da się zastosować tego samego sterownika do różnych typów silników. Co więcej, nawet w tej samej grupie napędów można znaleźć modele o diametralnie różniących się parametrach mechanicznych, elektrycznych oraz funkcjonalnych – wszak sam silnik często nie wystarcza do realizacji danego zadania, a dopiero w połączeniu z przekładniami czy enkoderami może w pełni pokazać swoje możliwości.
Silniki do robotów
Silnik silnikowi nie równy